This part came with an Arduino starter kit bought in preparation for the first Limerick Hackathon. It was really difficult to find information on the web about this part.
The part description said that this was a common Anode display, which is wrong, it’s a common cathode. This means that you need to connect resistors to the pins driving each digit (rather than each segment pin with a common anode) to avoid blowing the LEDs.
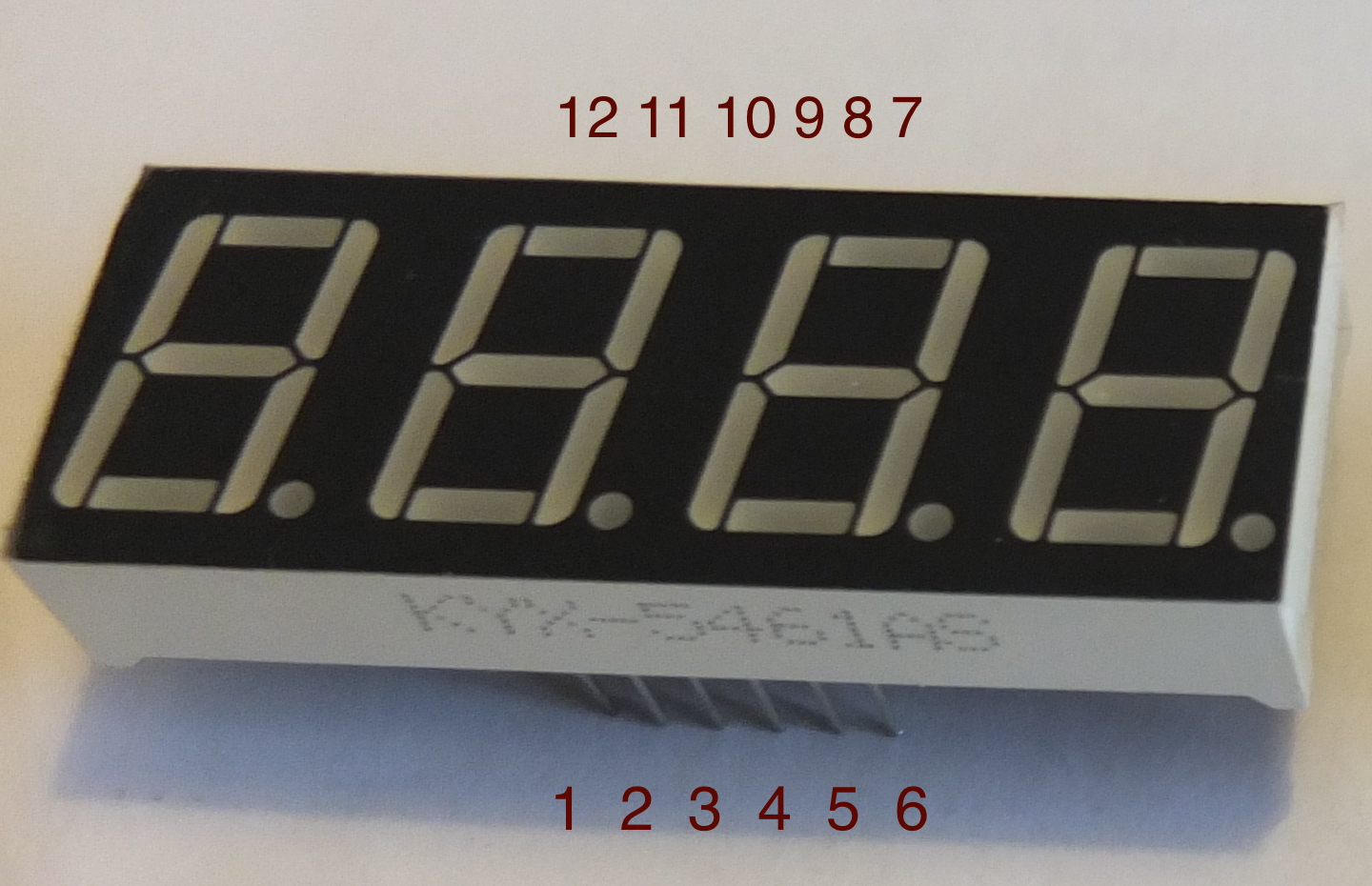
Here’s the pinout:
| 1 | Segment E |
| 2 | Segment D |
| 3 | Decimal point |
| 4 | Segment C |
| 5 | Segment G |
| 6 | Digit 4 |
| 7 | Segment B |
| 8 | Digit 3 |
| 9 | Digit 2 |
| 10 | Segment F |
| 11 | Segment A |
| 12 | Digit 1 |
Segment labels (I can never seem to remember these):

So to display a number 1 on the third digit you would power pins 4, 7 and 8.
To display numbers on all 4 digits, you need to introduce a delay in between powering each digit in your loop() block.
To test I rigged up a LM35 temperature sensor to an Arduino board and displayed the temperature on the display. The display was a bit dim as the lowest resistors I had were 1kΩ which were too high.

Here’s the quick code I wrote to read the temperature from a LM35 temperature sensor and display it on the KYX-5461AS display.
//reading temperature and outputting to display
int sensorPin = 0;
//display pins
int segA = 5;
int segB = 13;
int segC = 10;
int segD = 8;
int segE = 7;
int segF = 4;
int segG = 11;
int segPt = 9;
int d1 = 6;
int d2 = 3;
int d3 = 2;
int d4 = 12;
int delayTime = 900;
int counter = 0;
float temperature = 77.7;
void setup() {
// put your setup code here, to run once:
//start serial communications
Serial.begin(9600);
//set up outputs
pinMode(12, OUTPUT);
pinMode(11, OUTPUT);
pinMode(10, OUTPUT);
pinMode(9, OUTPUT);
pinMode(8, OUTPUT);
pinMode(7, OUTPUT);
pinMode(6, OUTPUT);
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
pinMode(3, OUTPUT);
pinMode(2, OUTPUT);
pinMode(13, OUTPUT);
pinMode(0,INPUT);
delay(1000);
}
void loop() {
// put your main code here, to run repeatedly:
//only read temp every 100 cycles
if(counter%500 == 0)
{
// read the pin
int reading = analogRead(sensorPin);
//convert reading to volts
float volts = (reading * 5.0);
volts /= 1024.0;
// Serial.print(volts);
// Serial.println(" v");
temperature = volts * 100.0;
Serial.print(temperature);
Serial.println(" degrees Celsius");
//test output to display
// allHigh();
//reset our counter
counter = 0;
}
counter ++;
selectDigit(1);
sendDigit(tens(temperature));
delayMicroseconds(delayTime);
digitalWrite(d1, HIGH);
selectDigit(2);
sendDigit(ones(temperature));
point();
delayMicroseconds(delayTime);
digitalWrite(d2, HIGH);
selectDigit(3);
sendDigit(points(temperature));
delayMicroseconds(delayTime);
//turn point off
digitalWrite(d3, HIGH);
digitalWrite(segPt,HIGH);
selectDigit(4);
cee();
delayMicroseconds(delayTime);
digitalWrite(d4, HIGH);
}
void allLow() {
digitalWrite( 13, LOW); // A
digitalWrite( 2, LOW); // B
digitalWrite( 3, LOW); // C
digitalWrite(4, LOW); // D
digitalWrite(5, LOW); // E
digitalWrite( 6, LOW); // F
digitalWrite( 7, LOW); // G
digitalWrite(8, LOW); //point
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(12, LOW);
}
void allHigh() {
digitalWrite( 13, HIGH); // A
digitalWrite( 2, HIGH); // B
digitalWrite( 3, HIGH); // C
digitalWrite(4, HIGH); // D
digitalWrite(5, HIGH); // E
digitalWrite( 6, HIGH); // F
digitalWrite( 7, HIGH); // G
digitalWrite(8, HIGH); //point
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, HIGH);
digitalWrite(12, HIGH);
}
void one()
{
digitalWrite(segA, LOW);
digitalWrite(segB, HIGH);
digitalWrite(segC, HIGH);
digitalWrite(segD, LOW);
digitalWrite(segE, LOW);
digitalWrite(segF, LOW);
digitalWrite(segG, LOW);
digitalWrite(segPt, LOW);
}
void two()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, HIGH);
digitalWrite(segC, LOW);
digitalWrite(segD, HIGH);
digitalWrite(segE, HIGH);
digitalWrite(segF, LOW);
digitalWrite(segG, HIGH);
digitalWrite(segPt, LOW);
}
void three()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, HIGH);
digitalWrite(segC, HIGH);
digitalWrite(segD, HIGH);
digitalWrite(segE, LOW);
digitalWrite(segF, LOW);
digitalWrite(segG, HIGH);
digitalWrite(segPt, LOW);
}
void four()
{
digitalWrite(segA, LOW);
digitalWrite(segB, HIGH);
digitalWrite(segC, HIGH);
digitalWrite(segD, LOW);
digitalWrite(segE, LOW);
digitalWrite(segF, HIGH);
digitalWrite(segG, HIGH);
digitalWrite(segPt, LOW);
}
void five()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, LOW);
digitalWrite(segC, HIGH);
digitalWrite(segD, HIGH);
digitalWrite(segE, LOW);
digitalWrite(segF, HIGH);
digitalWrite(segG, HIGH);
digitalWrite(segPt, LOW);
}
void six()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, LOW);
digitalWrite(segC, HIGH);
digitalWrite(segD, HIGH);
digitalWrite(segE, HIGH);
digitalWrite(segF, HIGH);
digitalWrite(segG, HIGH);
digitalWrite(segPt, LOW);
}
void seven()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, HIGH);
digitalWrite(segC, HIGH);
digitalWrite(segD, LOW);
digitalWrite(segE, LOW);
digitalWrite(segF, LOW);
digitalWrite(segG, LOW);
digitalWrite(segPt, LOW);
}
void eight()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, HIGH);
digitalWrite(segC, HIGH);
digitalWrite(segD, HIGH);
digitalWrite(segE, HIGH);
digitalWrite(segF, HIGH);
digitalWrite(segG, HIGH);
digitalWrite(segPt, LOW);
}
void nine()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, HIGH);
digitalWrite(segC, HIGH);
digitalWrite(segD, HIGH);
digitalWrite(segE, LOW);
digitalWrite(segF, HIGH);
digitalWrite(segG, HIGH);
digitalWrite(segPt, LOW);
}
void zero()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, HIGH);
digitalWrite(segC, HIGH);
digitalWrite(segD, HIGH);
digitalWrite(segE, HIGH);
digitalWrite(segF, HIGH);
digitalWrite(segG, LOW);
digitalWrite(segPt, LOW);
}
void cee()
{
digitalWrite(segA, HIGH);
digitalWrite(segB, LOW);
digitalWrite(segC, LOW);
digitalWrite(segD, HIGH);
digitalWrite(segE, HIGH);
digitalWrite(segF, HIGH);
digitalWrite(segG, LOW);
digitalWrite(segPt, LOW);
}
void point()
{
digitalWrite(segPt, HIGH);
}
void selectDigit(int d)
{
/*
digitalWrite(d1,HIGH);
digitalWrite(d2,HIGH);
digitalWrite(d3,HIGH);
digitalWrite(d4,HIGH);
*/
switch (d)
{
case 1:
digitalWrite(d1, LOW);
break;
case 2:
digitalWrite(d2, LOW);
break;
case 3:
digitalWrite(d3, LOW);
break;
default:
digitalWrite(d4, LOW);
break;
}
}
void sendDigit(int x)
{
switch(x)
{
case 1:
one();
break;
case 2:
two();
break;
case 3:
three();
break;
case 4:
four();
break;
case 5:
five();
break;
case 6:
six();
break;
case 7:
seven();
break;
case 8:
eight();
break;
case 9:
nine();
break;
case 10:
cee();
break;
default:
zero();
break;
}
}
int tens(float x)
{
float divided = x/10.0;
return (int)divided;
}
int ones(float x)
{
float divided = x - (10.0 * tens(x));
// Serial.print(divided);
// Serial.println(" ***ones***");
return (int)divided;
}
int points(float x)
{
float divided = x - (10.0 * tens(x)) - ones(x);
divided *= 10;
return (int)divided;
}